News
Scroll to view more
×
|

Chunran Zheng, Fu Zhang
In Revision
Paper / Code
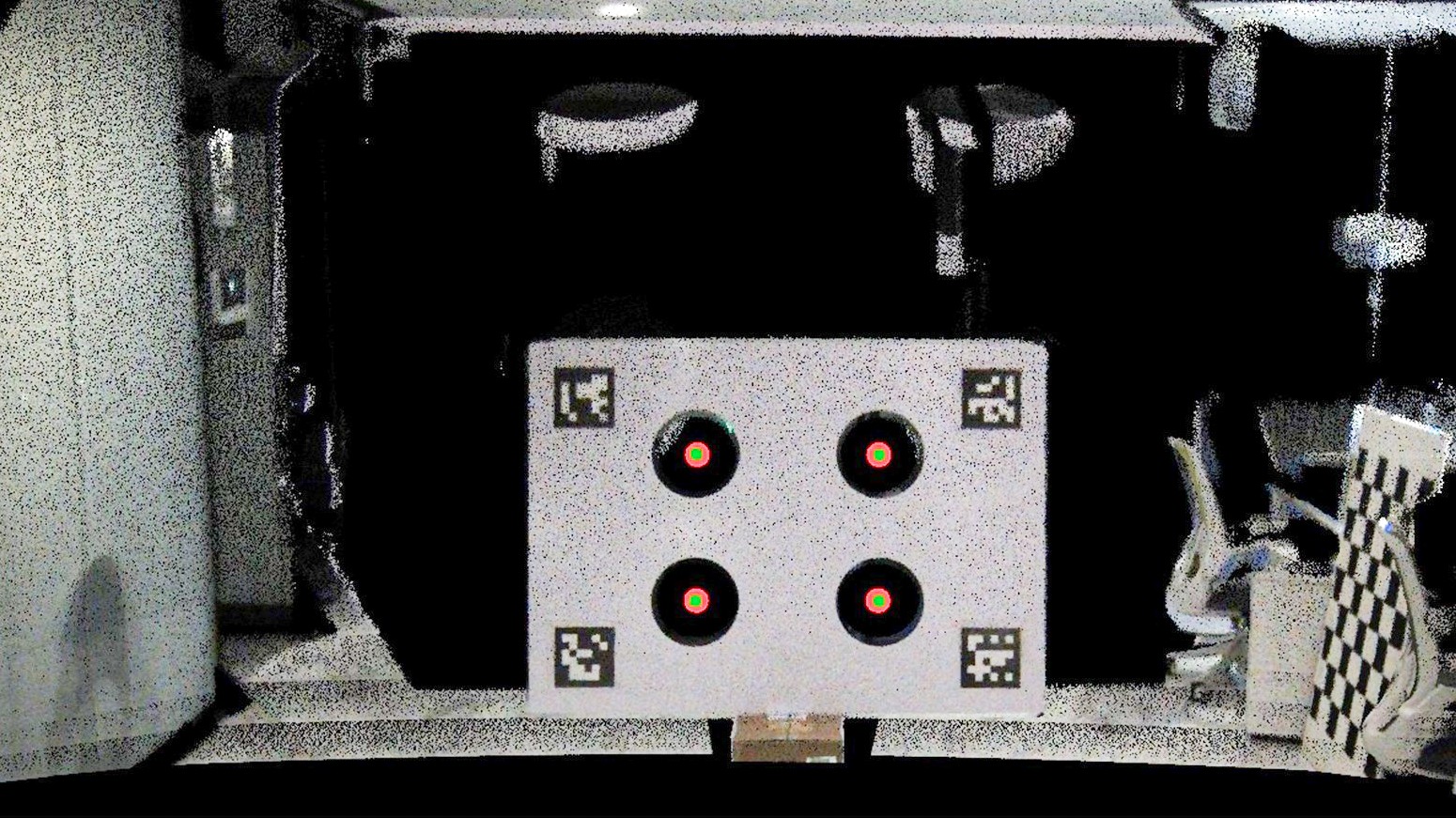
An efficient target-based extrinsic calibration tool for LiDAR-camera systems (e.g., FAST-LIVO2), making extrinsic calibration as straightforward as intrinsic calibration.
Chunran Zheng, Qingyan Zhu, Wei Xu, Xiyuan Liu, Qizhi Guo, Fu Zhang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Paper / Code / Bilibili / YouTube
A fast, sparse-direct LiDAR-inertial-visual odometry system built upon two tightly-coupled and direct odometry subsystems: a VIO subsystem and a LIO subsystem.
Chunran Zheng, Wei Xu, et al
IEEE Transactions on Robotics (TRO), 2025
Paper / Code / Bilibili / YouTube
FAST-LIVO2 is a supercharged upgrade of FAST-LIVO, integrating visual and LiDAR data within a single unified voxel map. The system achieves pixel-level reconstruction and robust onboard state estimation, even under severe LiDAR degeneration. It further demonstrates its capability through diverse downstream applications, including textured mesh, 3DGS, navigation, and airborne mapping, establishing a solid foundation for LiDAR-visual spatial AI.
Bingyang Zhou, Chunran Zheng (co-first author), Ziming Wang, Fangcheng Zhu, Yixi Cai, Fu Zhang
IEEE Robotics and Automation Letters (RA-L), 2025
Paper
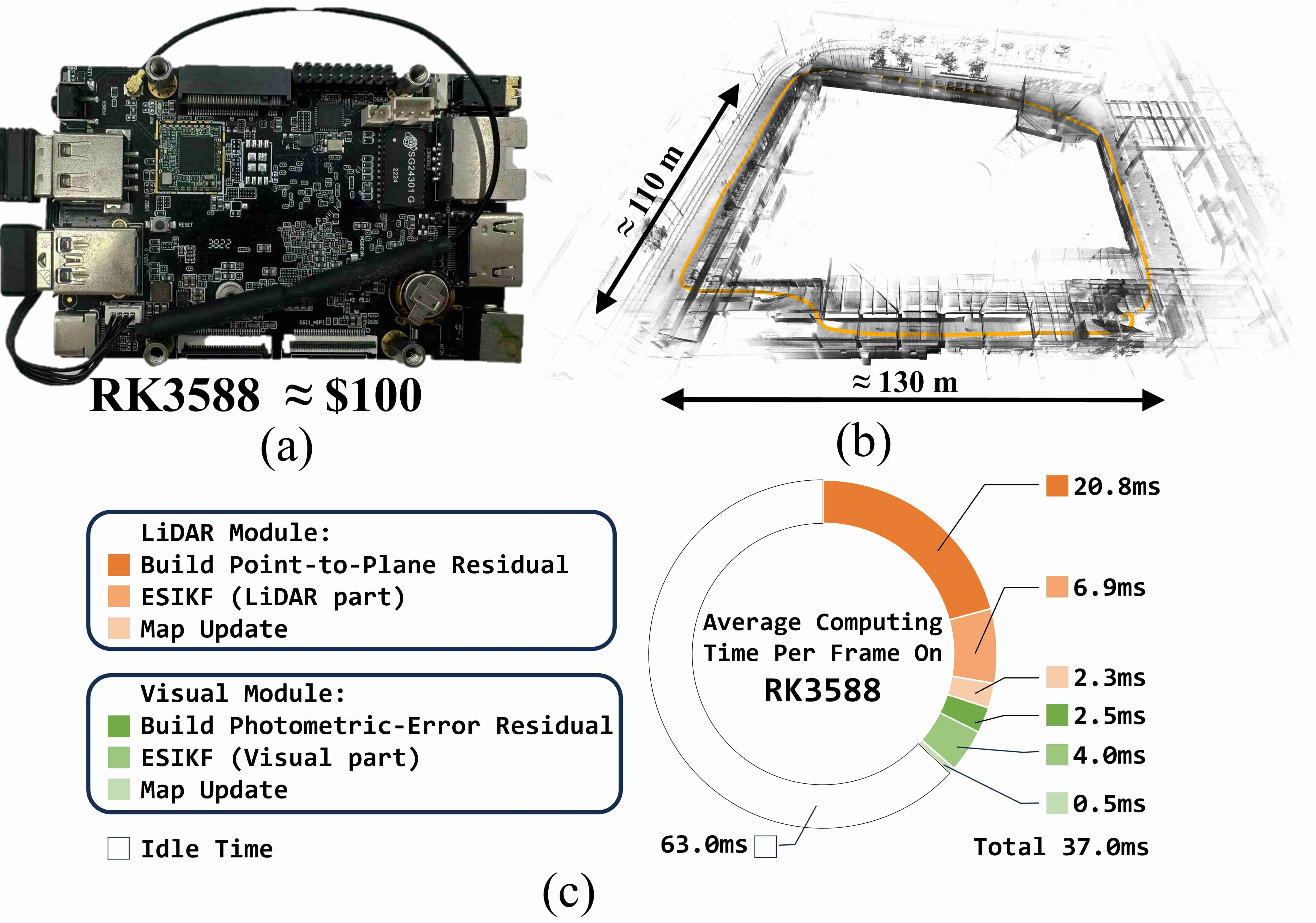
A lightweight adaptation of FAST-LIVO2 for ARM platforms (e.g., RK3588 and Orin NX).
Sheng Hong, Chunran Zheng (co-first author), Fu Zhang, Tong Qin, Shaojie Shen
IEEE Transactions on Robotics (TRO), 2025
Paper / Code
The first real-time Gaussian-based LIVO system enabling photorealistic and high-fidelity scene representation.
Chunran Zheng, Sheng Hong, Tianyong Ye, Junjie He
Open-source project
Code
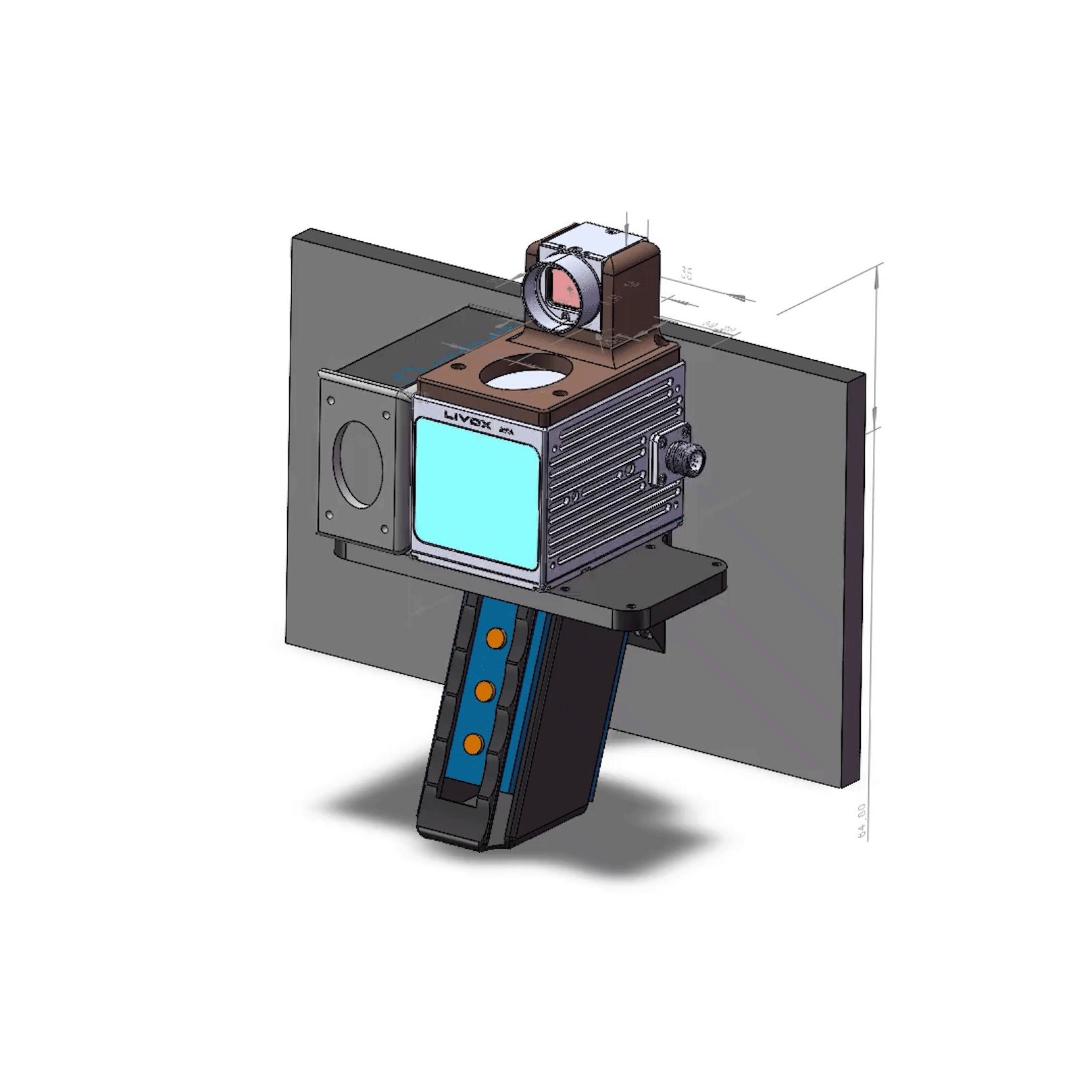
Hardware-synchronized Handheld and UAV device for FAST-LIVO, delivering the first proven open-source solution for Modular 3D Scanner.